- KDDIホーム
- 企業情報
- ニュースリリース一覧
- 2022年
- ドローン運航管理システムのプロバイダ認定要件に関する研究開発を開始
ドローン運航管理システムのプロバイダ認定要件に関する研究開発を開始
~レベル4飛行、その先の社会実装に必要な基盤を官民連携で構築~
- KDDI株式会社
2022年12月27日
KDDIは、国立研究開発法人新エネルギー・産業技術総合開発機構 (NEDO) や経済産業省、国土交通省をはじめ、公的機関や研究機関などと連携し、ドローン運航管理システムのプロバイダ認定要件の検討に関する研究開発 (以下 本取り組み) を開始します。
本取り組みは、NEDOが推進するプロジェクト「次世代空モビリティの社会実装に向けた実現プロジェクト (ReAMo (リアモ) プロジェクト)」(![]() 注1) の採択を2022年8月2日に受け、実施するものです。
注1) の採択を2022年8月2日に受け、実施するものです。
ドローン同士が衝突を回避し安全な飛行を可能にするためのドローン運航管理システムは、現在多くのプロバイダが開発しています。2022年12月に「有人地帯における補助者なし目視外飛行 (レベル4飛行)」が解禁されるなど、ドローンの運航頻度は今後高まり、空域が混雑するにつれてドローン運航管理システムの普及が進むことが想定されます。
そのため、ドローン運航管理システムに対し、複数ドローンの飛行計画や飛行状況、地図・気象情報などを集約・共有する機能や有人機の位置情報を共有する機能など、技術的な要件を定める必要があります。また、ドローン運航管理システムを提供するプロバイダに対しても、システムを安定的に提供できるかなどの要件を定める必要があります。
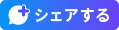
本取り組みでは、「運用コンセプトの検討」「技術基準および運用体制の検討」「性能要件の検討」「ドローン運航管理システム同士の接続インターフェースの設計および開発」の4つについて、研究開発します。
<本取り組みの実施内容・実施イメージ>
KDDIは今後も、KDDIスマートドローンと共同で"叶えるために、飛ぶ。"をミッションに、安全にドローンが飛び交い、人々の願いを叶える社会の実現に向け、事業を推進していきます。
詳細は別紙をご参照ください。
<別紙>
■本取り組みについて
1. 課題
レベル4飛行の解禁をきっかけに、ドローンは物流・点検・警備・災害対応などの場面において、企業や自治体による新しい空のインフラとしての利活用が期待されています。一方、レベル4飛行の実現に伴い、ドローンの運航頻度が上がるにつれて、空域内でのドローン同士の衝突回避が課題となります。
2. 背景
上記の課題解決を目指し、KDDIでは、昨年度までNEDOが推進していた「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」の「無人航空機の運航管理システム及び衝突回避技術の開発/地域特性・拡張性を考慮した運航管理システムの実証事業」において、ドローンの有人地帯におけるレベル4飛行を実現するための運航管理機能の開発を推進し、2021年には全国13地域で計52機のドローンを同時に飛行させ、運航管理を行う実証実験を実施しました (![]() 注2)。
注2)。
こうした取り組みの成果も踏まえ、「小型無人機に係る環境整備に向けた官民協議会」においては、今後、航空局が認めたプロバイダのドローン運航管理システムを利用することで、リスクの高い飛行や混雑した空域における高密度な運航を可能としていくとの方向性が示され、ドローン運航管理システムのプロバイダ認定要件の整備が進められる予定です (![]() 注3)。
注3)。
3. 研究開発の内容
KDDIとKDDIスマートドローン (![]() 注4) が共同開発している、モバイル通信に対応したドローンの遠隔制御・自律飛行を実現する運航管理システム開発のノウハウ、過年度の実証における成果、および産業界のニーズを基に、ドローン運航管理システムのプロバイダ認定要件の検討に関する研究開発を行います。
注4) が共同開発している、モバイル通信に対応したドローンの遠隔制御・自律飛行を実現する運航管理システム開発のノウハウ、過年度の実証における成果、および産業界のニーズを基に、ドローン運航管理システムのプロバイダ認定要件の検討に関する研究開発を行います。
具体的には以下の4つを実施します。
- ドローン運航管理システムの運用コンセプト (ConOps: Concept of Operations) の検討
- ドローン運航管理システムの技術基準および運用体制の検討
- ドローン運航管理システムの性能要件の検討
- ドローン運航管理システム同士の接続インターフェースの設計および開発
(参考)
■運航管理システム接続エリア拡大に向けた通信技術の開発について
本取り組みでは、ドローン運航管理システムのプロバイダ認定要件に関する研究開発に加え、ドローン運航管理システム接続エリア拡大に向けた通信技術の開発も実施します。
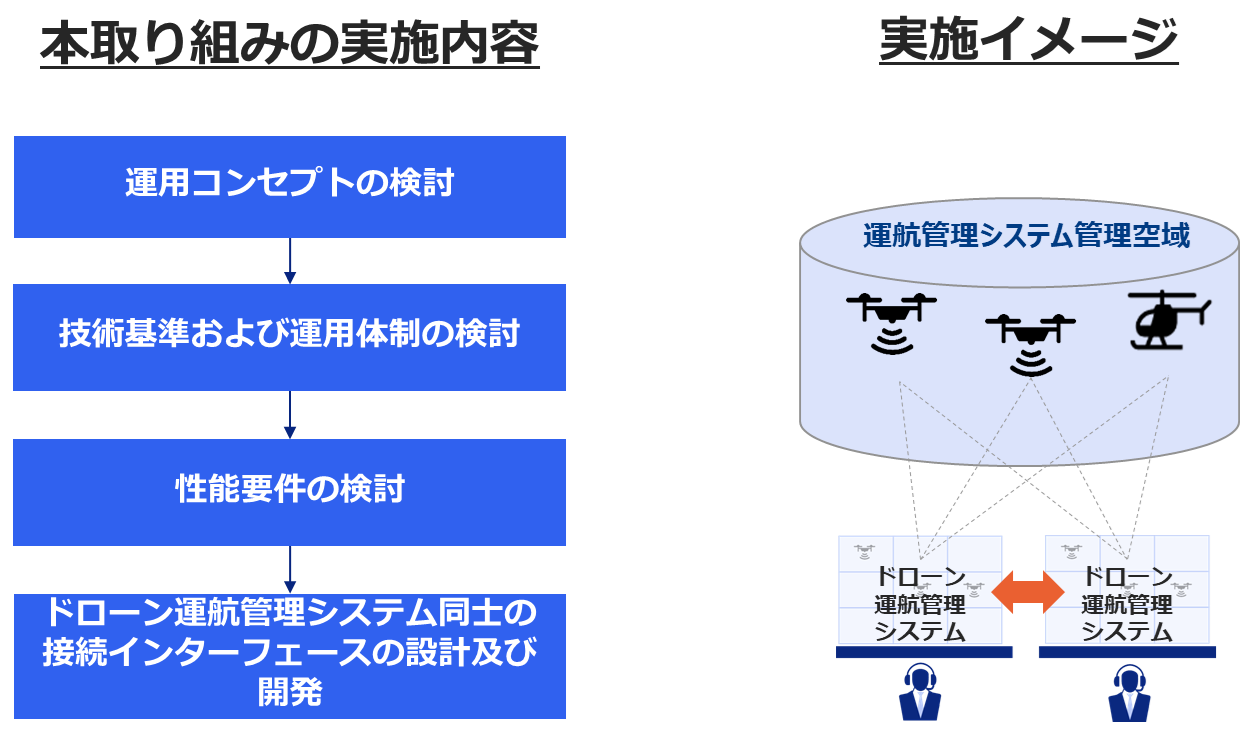
ドローンの運航管理の実現には、機体とドローン運航管理システム間の動的なデータ連携を支える通信インフラの構築が必須となり、モバイル通信はその有力な手段の一つとして期待されています。しかし、既存のモバイル通信は地上での利用を前提に設計されていることから、特に離島や中山間地域などの地理的に条件不利な地域において、通信品質が安定的に確保されない場合があることが運用上の課題となっています。加えて、上空でのモバイル通信の利用は、他の通信システムの利用へ影響を与えるおそれがあることから、現行制度下では高度150m未満の空域で一定の技術的条件に合致する端末のみに運用が制限されています (![]() 注5)。その一方で、ドローンやヘリコプターにおける高度150m以上でのモバイル通信の利用ニーズが顕在化しつつあります (
注5)。その一方で、ドローンやヘリコプターにおける高度150m以上でのモバイル通信の利用ニーズが顕在化しつつあります (![]() 注6)。
注6)。
このような背景を踏まえ、ドローンの運航管理の実現に向けて上空におけるモバイル通信の可用性向上および通信品質改善を目的とした以下の研究を実施します。
- 上空におけるモバイル通信のエリア拡大および高高度での利用に向けた通信技術の調査
- モバイル通信と衛星を利用した通信を組み合わせたハイブリッドな通信技術の調査
<ドローン運航管理システム接続エリア拡大のイメージ>
■NEDOが推進する「ReAMo (リアモ) プロジェクト」について
次世代空モビリティ (ドローン・空飛ぶクルマ) はヒト・モノの新しい移動手段として、また、物流分野インフラ点検分野などを効率化する手段として注目され、機体開発や運航管理技術などの研究開発や実証実験、法整備などのルール作りが進んでおり、今後の市場拡大が期待されています。
本プロジェクトでは、【1】次世代空モビリティの安全性向上・高性能化のための、機体性能を適切に評価する性能評価手法の開発、【2】操縦者が1人で複数のドローンを安全に運航する「1対多運航」を実現するための要素技術と当該技術に対する性能評価手法の開発、【3】低高度空域を飛行するドローンや空飛ぶクルマと航空機がより安全で効率的な航行を行うために必要となる運航管理技術の開発など、次世代空モビリティの実現に必要な技術開発を実施します。
■「ReAMo (リアモ) プロジェクト」における「運航管理技術の開発」について
低高度空域を飛行するドローン・空飛ぶクルマ・既存航空機がより安全で効率的な航行が可能となる統合的な運航管理技術を開発します。具体的には、運航管理のあり方について海外動向調査や国内の官民協議会などの議論を踏まえたアーキテクチャ設計、シミュレーターや実証などを通じた運航管理システム設計を行います。また、運航管理システムやセンサーなどによる衝突回避技術の開発、エコシステム構築に向けて実証などを通じたオペレーションの検証、将来的な自動・自律飛行、高密度化に向けた通信・航法・監視技術や運航を支援する地上システム・インフラ・データ提供技術などに関する開発を行います。
-
- 注2)
- 2021年11月24日ニュースリリース
 国内最大規模、全国13地域で同時に飛行するドローンの運航管理に成功
国内最大規模、全国13地域で同時に飛行するドローンの運航管理に成功
~レベル4を見据え、目視外の有人地帯で安全に飛び交う社会の実現へ~
-
- 注4)
- KDDIスマートドローン株式会社
-
- 注5)
- 総務省 電波利用ホームページ