- KDDIホーム
- 企業情報
- ニュースリリース一覧
- 2017年
- KDDI・ゼンリン・富士通、自動運転向け「ダイナミックマップ」の生成・配信技術の実証実験を開始
KDDI・ゼンリン・富士通、自動運転向け「ダイナミックマップ」の生成・配信技術の実証実験を開始
~4G LTEおよび次世代移動通信システム「5G」を活用~
- KDDI株式会社
- 株式会社ゼンリン
- 富士通株式会社
2017年12月26日
KDDI株式会社 (本社: 東京都千代田区、代表取締役社長: 田中孝司、以下、KDDI)、株式会社ゼンリン (本社: 福岡県北九州市、代表取締役社長: 髙山善司、以下、ゼンリン)、富士通株式会社 (本社: 東京都港区、代表取締役社長: 田中達也、以下、富士通) は、2018年1月より、完全自動運転時代の「ダイナミックマップ」生成に必須技術となる大容量データの情報収集と、自動運転車へのマップ配信技術の実証実験を開始することに合意しました。
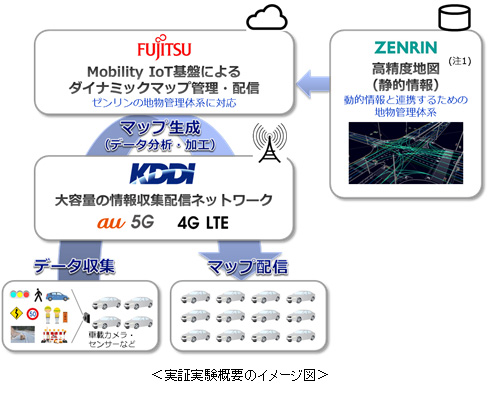
■実証実験の概要
自動運転車の安全な走行を実現するには、自車位置把握のための様々な道路構造物情報の正確な把握と、気象情報や事故・渋滞情報などの動的情報を取得して組み合わせる「ダイナミックマップ」の生成が必要となります。この「ダイナミックマップ」には、自車の走行経路を認識しながら遠方の道路状況をリアルタイムにフィードバックするシステムの構築が欠かせません。
KDDI、ゼンリン、富士通は、「ダイナミックマップ」の生成に必要なデータ収集、データ分析・加工、データ配信技術の実証を行います。実証実験においては4G LTEおよび、今後、次世代移動通信システム「5G」の活用を検討していきます。
■実証実験の目的
将来の完全自動運転時代の「ダイナミックマップ」のためのデータ収集・生成・配信基盤を構築します。構築した基盤にて、動的情報と道路構造物の高精度地図とを連携させてデータ生成する処理性能や、配信に要する時間などを検証します。
■各社役割
■実施時期
2018年1月開始
■ダイナミックマップについて
「ダイナミックマップ」は、車の自動運転や運転支援システムに必要となる高精度の3次元情報を持つデジタル地図。静的な地図情報に加え、工事や事故、渋滞などの更新頻度の高い動的情報を、時間変化の度合い別に複数層に分けて管理し、それらを連携して自車の周辺状況を含んだ地図情報をリアルタイムに生成する方法が検討されています。国内では内閣府主導で官民が連携し、「ダイナミックマップ」の構築に取り組んでいます。
■ダイナミックマップ イメージ (リンク先 3頁参照)
![]() http://www.kantei.go.jp/jp/singi/keizaisaisei/miraitoshikaigi/4th_sangyokakumei_dai3/siryou9.pdf (1.9MB)
http://www.kantei.go.jp/jp/singi/keizaisaisei/miraitoshikaigi/4th_sangyokakumei_dai3/siryou9.pdf (1.9MB)
(内閣府 WEBサイトより)
今後、三社は、各社の持つ要素技術の実証を通じ、安心安全なカーライフの実現を目指して参ります。
【参考Webサイト】
KDDI公式サイト IoTソリューション内「![]() KDDIが考えるコネクティッドカーの世界」をご参照ください。
KDDIが考えるコネクティッドカーの世界」をご参照ください。
【商標について】
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
【注釈】