- KDDIホーム
- 企業情報
- ニュースリリース
- 2016年
- au×HAKUTO オフィシャルパートナー契約を締結し、Google Lunar XPRIZEに挑戦!
- HAKUTOのプロジェクトにおけるauの使命
HAKUTOのプロジェクトにおけるauの使命
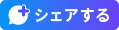
HAKUTOの月面探査ロボット (以下、ローバーと記載) は、月面着陸船 (以下、ランダーと記載) を経由し無線通信で操作を行います。地球から約384,400km離れた月面で無線通信を行うためには、さまざまな困難が予想されます。
本ミッションでは、[1] ローバーを500m以上走行させ、[2] ローバーに搭載されたカメラで撮影した月面の動画や静止画データを地球に送信すること、が求められます。さらに、これらを特別に開発された通信機器や通信技術ではなく、民生品を活用する点も重要なポイントとなります。
何れのミッションも月面での無線通信が途切れてしまうと達成できません。KDDIは、これまで培ってきた通信における技術力や経験を最大限活用し、民間企業で初となる本プロジェクトの成功をサポートしていきます。
1. 月面での通信を途切れさせないこと
電波は、様々な環境の変化によって影響を受けます。そのため、月面環境をあらゆる側面で想定すると共に通信への影響をシミュレーションし、対策を講じることが成功の鍵となります。
| 想定される月面のコンディション (地上との差分) | 電波への影響 (想定) |
|---|---|
| 月面の起伏、岩石やクレーターなどの障害物 | 月面の起伏 (丘陵や窪地)、障害物により、ランダーとローバーとの間の見通し通信が途切れてしまう。電波の反射と回折特性への適切な理解と評価が不可欠となる。 |
| 水が無いため土壌が極端に乾燥している | 電波の回折や反射、透過や減衰の影響が地球上とは異なるため地球では想像できない電波の飛び方が懸念される。 |
| 地表が"レゴリス"と呼ばれる1mm以下のパウダー状の砂で覆われている | 重力が地球の1/6であるため、ローバーの動きで砂が舞い上がることが予想される。(砂埃がどの程度電波の障害物に成り得るか未知数。) |
| 温度差 (昼は100℃以上、夜は-150℃以下) | 通信機器のパフォーマンスの影響により、電波出力や受信感度への影響が懸念される。 |
◆最適なアンテナシステムの設計を行うために
国内に十数ヵ所しかない高い遮蔽性を持つ大型の電波無響室 (KDDI研究所内) を活用し、高精度の電波伝搬測定を実施。
電波は、環境によって反射や回析の影響を受けるため、電波無響室を利用することによって、ローバーの型状や素材を織り込んだアンテナパターンを測定することができます。
電波無響室とは
電波を正確に測るために、壁、床、天井の六面に約50dBもの電波吸収能力をもつ吸収体を張り巡らせた特別室。
壁面での電波の反射が約 1/100,000まで減衰されるため、正確なアンテナパターンが得られます。


ローバーが月面を走行する際、方向や斜度に関わらず、電波を最も確実に送受信できるアンテナの取り付け位置や角度を推定するため、0.1度単位で角度が変更可能なアンテナ回転台を用意し、水平方向:360度/垂直方向: 30度に対して測定を実施しました (パターンは100を超える)。
2. 低いスループットの環境下で高解像度の動画・静止画データを効率的に送信すること
月面における通信は、電波環境によってスループットが急激に変化する可能性があります。また、ランダーから離れれば離れるほど電波は減衰します。このような環境の中で、高解像度の動画、静止画データを送信するためには、データの欠落を修正し再現性を確保する技術 (データ復元技術) に加え、短時間で効率的にデータを送信するデータ圧縮技術が必要となります。
◆データ圧縮技術
映像圧縮技術は、特別に開発するものではなく一般的に広く普及している「H.264」エンコーダを用いて実現します。
月面撮影に特化した解像度、フレームレート、画質の最適解を様々な角度からシミュレーションを重ね決定していきます。
◆データ復元技術
月面撮影に典型的なカメラノイズ、撮影の構図、色成分、走行中のブレを考慮し、時間および空間方向での画像復元を通じ、月面さながらのリアリティを再現します。
| 考慮するポイント | 想定 |
|---|---|
| カメラノイズ | 照明条件が不十分であるため小型センサーではノイズの発生 |
| 撮影の構図 | ローバー搭載カメラから撮影のため構図は、基本的に「月面+夜景」のシンプルな構成と予測 |
| 色成分 | 暗い環境での月面撮影なので色成分の存在は限定的であり、むしろ輝度成分が支配的と予測 |
| 走行中のブレ | ローバーの走行する月面の凹凸に伴う撮影のブレを考慮 |