au's mission in the HAKUTO Project
au's mission in the HAKUTO Project
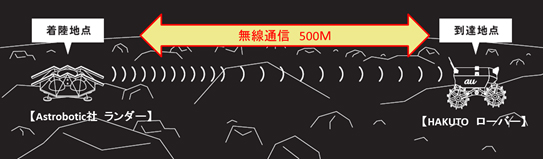
Team HAKUTO's lunar exploration robot ("rover") is operated through radio signals transmitted from the landing craft ("lander"). A variety of difficult situations can be expected to occur when attempting radio transmission on the moon approximately 384,400 kilometers from Earth.
Two requirements need to be met for a successful mission: (1) to be able to drive the rover for a distance of at least 500 meters and (2) transmit videos and still image data of the lunar surface taken by the camera on board the rover. Another key point is that this project uses commercial-off-the-shelf products instead of specially developed telecommunication equipment and techniques.
None of the objectives of this mission can be accomplished if radio transmission on the moon is interrupted or breaks up. Fully drawing on the long-established technological prowess and experience, KDDI supports the success of this project as the first private company to partner with HAKUTO.
1. To ensure continuous communication on the moon
Radio waves are affected by various changes in the environment. For that reason, simulating the impacts the foreseen aspects of lunar environment may have on communication and taking measures against them are the key to success.
| Foreseen lunar conditions (how it differs from Earth) | Predicted impact on radio waves |
|---|---|
| Undulations of the lunar surface, rocks, craters, and other obstructions | Undulations of the lunar surface (e.g. hills and valleys) and other obstructions can cut off line-of-sight communication between the lander and rover. Precise understanding and assessment of the reflection and diffraction characteristics of radio waves are essential. |
| Soil is extremely dry due to the lack of water | Soil is extremely dry due to the lack of water The impact of diffraction, reflection, transmission, and attenuation of radio waves is different from that on Earth; therefore, the fact that radio wave propagation is different from what is expected on Earth raises concerns. |
| The surface is covered with regolith, which is powdery sand made of particles smaller than 1 mm in diameter. | Because the moon's gravity is one-sixth of Earth's, the movement of the rover is expected to cause regolith to stir and fly up. (Size of impact of fugitive dust on radio waves is unknown.) |
| Significant temperature difference (Day 100°C or higher, Night: -150°C or lower) | Performance of telecommunications system may be compromised, which raises concerns for reduced radio wave output and/or reception sensitivity. |
Designing the optimal antenna system
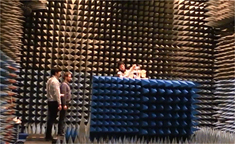
Using a large-scale radio wave anechoic chamber (at the KDDI Laboratory) that features the highest level of shielding performance in Japan, KDDI conducted high-precision radio wave propagation measurements. Radio waves can be reflected and diffracted according to the environment; therefore, using a radio wave anechoic chamber enables the analysis of antenna patterns that consider the profile and materials of the rover.
What is an anechoic chamber?
An anechoic chamber is a special room lined with absorbers that absorb radio waves up to approximately 50dB on all six sides--ceiling, floor, and walls--to accurately measure radio waves. The reflection of radio waves from the walls is attenuated to about 1/100,000, which provides precise antenna patterns.
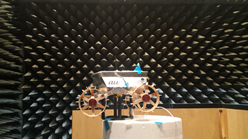
In order to calculate the best antenna mounting position and angle for radio wave transmission and reception, regardless of the direction or inclination of where the rover is being driven on the lunar surface, an antenna turntable with its angle adjustable in 0.1-degree increments was prepared. Radio waves were measured over 360 degrees in the horizontal direction and 30 degrees in the vertical direction. (More than 100 test patterns were tried.)
2. Efficiently transmitting high-resolution video and still image data under low-throughput conditions
The throughput for communication on the moon can rapidly change depending on the radio wave environment. Additionally, radio waves attenuate as the rover moves farther from the lander. To successfully transmit high-resolution video and still image data under such conditions, data compression technique to enable efficient data transmission over a short period of time is required on top of a data restoration technique that ensures data repeatability by compensating for missing data.
Data compression technique
Instead of developing a specific device for this project, video compression is achieved by the H.264 encoder, a commonly used, commercially available product.
The optimal resolution, frame rate, picture quality best suited for imaging the lunar surface are determined based on different considerations and numerous simulations.
Data restoration technique
Considering typical camera noise, imaging composition, color components, and shaking of the driven rover that can be experienced during lunar surface imaging, data is recovered to produce real-life images of the moon through temporal and spatial image restoration.
| Aspects considered | Predicted condition |
|---|---|
| Camera noise | Small sensors may allow noise due to the insufficient lighting conditions. |
| Imaging composition | As imaging is done by a camera mounted on the rover, the composition will basically be a simple combination of lunar surface and night view. |
| Color components | Color components are expected to be limited due to imaging on the moon possibly taking place in a dark environment. Rather, the luminance component is predicted to be more dominant. |
| Shaking of rover | Undulation on the lunar surface that the rover is driven on may destabilize imaging due to shaking. |